Reducing Knee Hyperextension with an Exoskeleton in Children and Adolescents with Genu Recurvatum: A Feasibility Study
https://www.embs.org/tbme/wp-content/uploads/sites/19/2023/11/TBME-01818-2022-Website_Image.jpg
1205
678
IEEE Transactions on Biomedical Engineering (TBME)
//www.embs.org/tbme/wp-content/uploads/sites/19/2022/06/ieee-tbme-logo2x.png
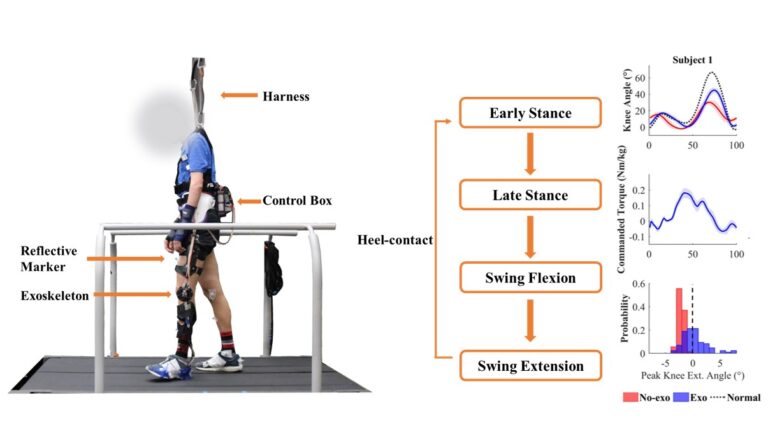
This work showcases a promising potential application of a robotic knee exoskeleton for improving the kinematic characteristics of genu recurvatum gait in children and young adults with neurological deficits.
read more