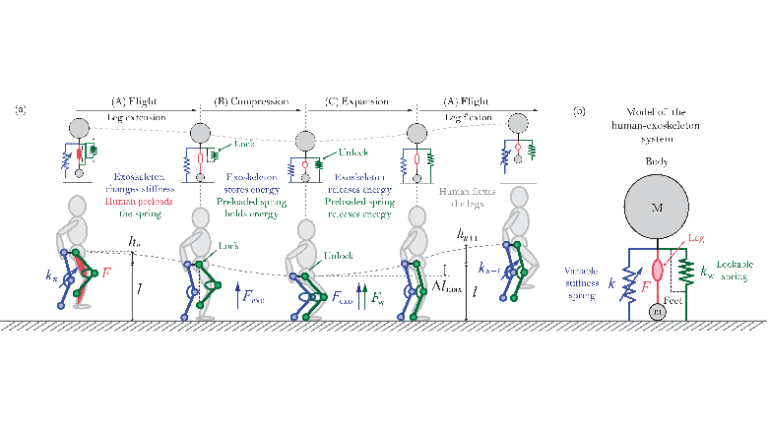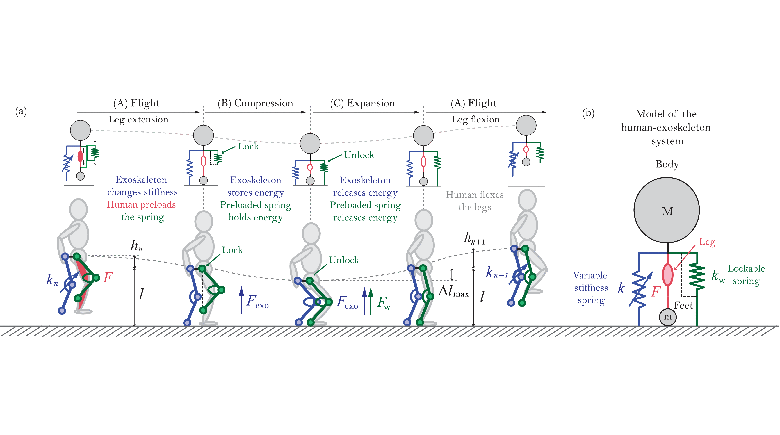
Shoes were invented to provide user comfort using rubber soles, despite marginal improvement in human mobility. Unlike shoes, current lower-limb exoskeletons use fixed stiffness springs to store and recycle energy to improve mobility. However, the maximum kinetic energy a human can accumulate when augmented with a fixed stiffness spring is limited by the maximum deflection and the ability of the limbs to generate force; tying the advantage of fixed stiffness exoskeletons to biological constraints. Here, we propose a method for improving mobility using quasi-passive variable stiffness spring exoskeletons , where the maximum kinetic energy accumulated by a human is independent of the limb deflection and the ability of the limb to generate force. This is achieved by a variable stiffness augmentation of the human, where the exoskeleton does not provide mechanical work . The theoretical advantage provided by this new augmentation method can be useful in demanding tasks, where humans could benefit from increased speed and reduced energy cost of motion.