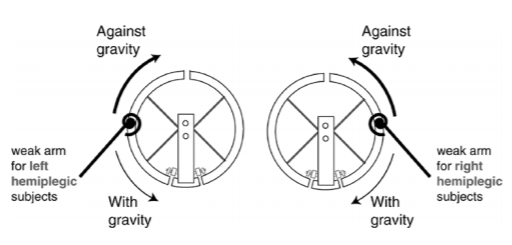
Abstract:Stroke is the leading cause of disability among adults in the United States. Behaviors such as learned nonuse hinder hemiplegic stroke survivors from the full use of both arms in activities of daily living. Active force-feedback cues, designed to restrain the use of the less-affected arm, were embedded into a meaningful driving simulation environment to create robot-assisted therapy device, driver’s simulation environment for arm therapy (SEAT). The study hypothesized that force-feedback control mode could “motivate” stroke survivors to increase the productive use of their impaired arm throughout a bilateral steering task, by providing motivating feedback and reinforcement cues to reduce the overuse of the less-affected arm. Experimental results demonstrate that the force cues counteracted the tendency of hemiplegic subjects to produce counter-productive torques only during bilateral steering tasks (p<0.05) that required the movement of their impaired arm in steering directions up and against gravity. Impaired arm activity was quantified in terms of torques due to the measured tangential forces on the split-steering wheel of driver’s SEAT during bilateral steering. Results were verified using surface electromyograms recorded from key muscles in the impaired arm.